The ArduSub/QGC system is an awesome pairing, and has enabled the rapid rise of low-cost, easy to use mini-ROVs (underwater drones) from manufacturers and suppliers such as Blue Robotics, Nido Robotics, and Aqua Exploracion. As active users and suppliers with a number of years troubleshooting experience, this is our collection of the top five issues first-time users come up against.

1. IP address
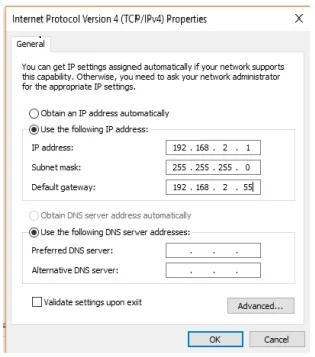
The incorrect IP address on the topside PC is the number 1 reason we see (by far!) when users struggle to get connected with an ArduSub ROV or drop camera. The default address is typically 192.168.2.1, and if you haven’t gone through to reconfigure your ethernet connections, this is likely the issue. See below for how to configure your ethernet settings on Windows machines (full description, including for Mac and Ubuntu in the ArduSub documentation here):
Settings>Network & Internet> Change adapter options>Right click Ethernet> Properties>Internet Protocol Version 4>Ensure IP address is configured as per the image below

2. Software Versions
This is the next most common issue we see. Currently, the most recent version of QGC is only compatible with Windows 10 machines, MacOS 10.10 and later, and Ubuntu 16.04 and later, so make sure your OS is compatible and download the most recent version here.
In a similar vein, most users should generally only be using the most recent, stable software rather than the beta/development versions. The beta versions are typically suited to developers or advanced users who need to to test/modify certain unreleased features, and may be unstable or have bugs. ArduSub can be updated using the QGC interface, and is described in full here.

3. Laptop “Power”
This point actually needs to be broken into two separate considerations:
Computing power- this is complicated due to the vast combinations of specs being used by customers, however, in our experience, we have never had any issues running laptops that use an i5 processor and 16GB of RAM. You could get away with 8GB, but RAM is so cheap, and upgrading is so easy (it literally just clips into the laptop), that there’s no excuse not to do it. Additional CPU power or graphics cards may not be necessary, but can certainly help, especially if you plan on running other programs in the background (positioning, sonar etc)
Power source- again, this is complicated, and we’ve seen different computers react in different ways to how they are powered. The best rule of thumb would be that if you are experiencing performance issues (lagging video, dropped frames etc), then you should try both powering your laptop externally (from a mains source), AND not (ie only using batteries). We’ve found some computers work best plugged into the mains, and (perhaps oddly) others work best running off their internal battery. Also be sure that you have selected the power option for “Best Performance” (check by clicking the power/battery icon).

4. Connections
This is more for the DIYers, but may also be applicable for other users. Be sure all your connections are tight. The most common fails we see with this is the two wire communication wires on the Homeplug PLC boards (or Blue Robotics “Fathom” boards) not connected securely. Remember there is another Homeplug board inside the ROV, so be sure to check that as well. Also be sure that your topside Homeplug board has a regulated power supply, noting that using a USB port may not always be the best option. Try a USB mains adapter if you are finding issues while using your laptop USB port as a power source.
Whilst on the topic of connections, if you are using multiple ethernet devices on the ROV, it’s best to use either a switch, or multiple Homeplug boards to run the devices over a single pair, as the crosstalk between adjacent pairs will all but destroy any communications you are attempting.

5. SD Cards
A less common failure, but a worthwhile area to inspect in case of poor performance/connection issues, is the SD card inside the Pixhawk flight controller and Raspberry Pi. Depending on where your card was sourced, it is quite possibly a counterfeit and a lower capacity, speed or both. This can have issues for your ROV, so if all the other above points are accounted for, it may be worthwhile getting new cards (or at least attempting to reflash the old ones first). Reflashing is not difficult, with all the instructions within the ArduSub documentation (Raspberry Pi, Pixhawk).
Honourable Mentions
The following stumbling blocks are also quite common, and can be easily avoided by following the startup steps in the ArduSub documentation:
-erratic vehicle movements- probably due to incorrect motor directions (go through the setup steps carefully!)
-erratic behaviour or errors in certain dive modes-be sure to calibrate the ROV (compass and accelerometer) in QGC as per the calibration wizard
-no vehicle response to topside commands-use a compatible controller, and be sure to calibrate it within QGC. Compatible controllers include Logitech F310, Logitech F710, Microsoft Xbox controllers, and wired PlayStation 4 controllers.
So that’s our top five fails we see when customers hit a roadblock with ArduSub/QGC. Fortunately, all the points are easily remedied, so by going through them carefully, you should be able to troubleshoot your machine and get wet again ASAP.
Feel free to get in touch (info@spotx.com.au) with any further questions, and for more technical tips and tricks, please visit the Spot X blog here.